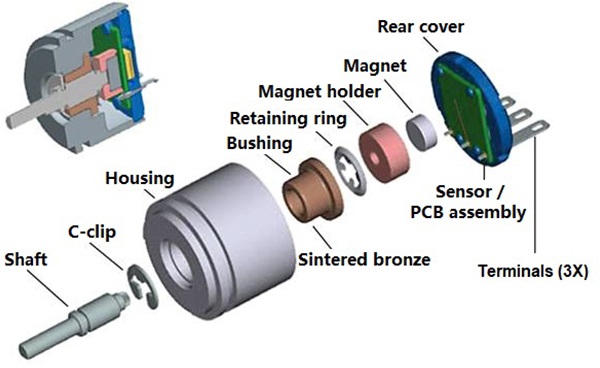
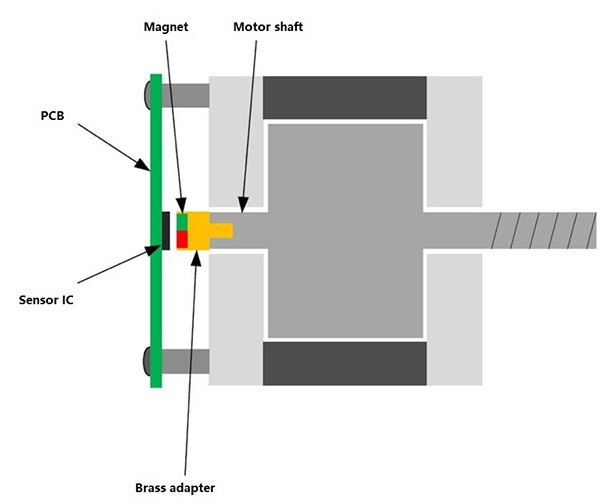
Ако имате възможност да разглобите магнитен ротационен енкодер, обикновено ще видите вътрешна структура като тази, показана по-горе. Магнитният енкодер се състои от механичен вал, черупкова структура, PCB модул в края на енкодера и малъкдисков магнитвъртящ се с вала в края на механичния вал.
Как магнитният енкодер измерва обратната връзка за позицията на въртене?
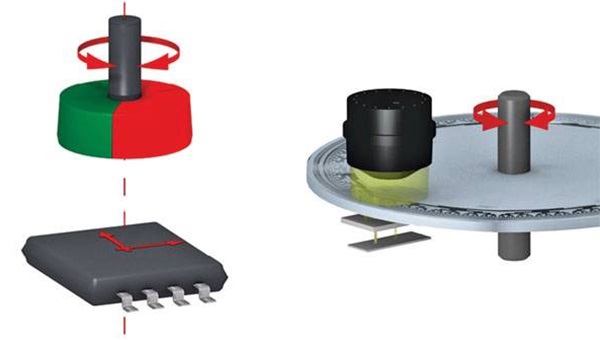
Ефект на Хол: създаване на потенциална разлика в проводник, протичащ с електрически ток, когато се прилага магнитно поле в посока, перпендикулярна на тази на протичащия ток.
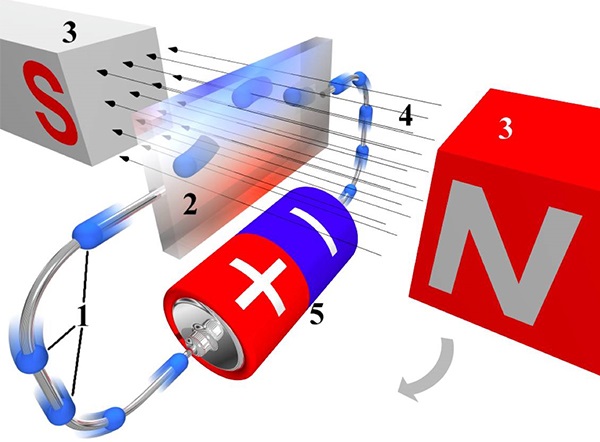
Ако магнитното поле, приложено към проводника, се завърти в посоката, показана от стрелката по-горе, с пътя на текущия поток като ос, потенциалната разлика на Хол ще се промени поради промяната на ъгъла между магнитното поле и проводника и тенденцията на промяна на потенциалната разлика е синусоидална крива. Следователно, въз основа на напрежението от двете страни на захранвания проводник, ъгълът на въртене на магнитното поле може да се изчисли обратно. Това е основният работен механизъм на магнитния енкодер при измерване на обратната връзка за позицията на въртене.
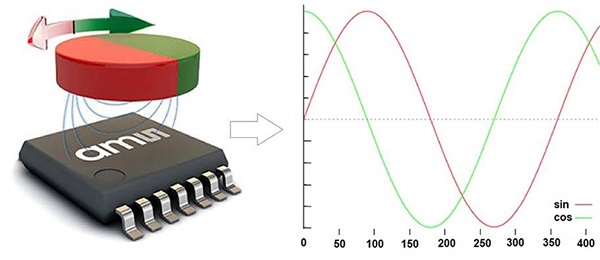
Подобно на принципа, че резолверът използва два комплекта взаимно перпендикулярни изходни намотки, два (или два чифта) индукционни елемента на Хол с взаимно перпендикулярни посоки на тока също са необходими в магнитния енкодер, за да се осигури уникалното съответствие между ротационната позиция на магнитното поле и изходното напрежение (комбинация).
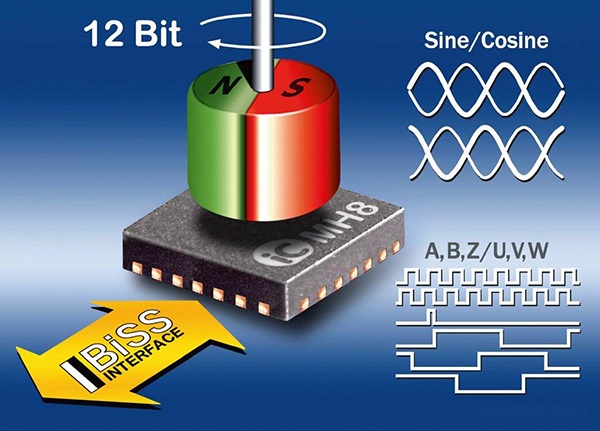
В днешно време сензорите на Хол (чипове), използвани в магнитни енкодери, обикновено имат висока степен на интеграция, която не само интегрира полупроводникови компоненти на Хол и свързани вериги за обработка и регулиране на сигнали, но също така интегрира различни видове изходни модули за сигнали, като синусови и косинусови аналогови сигнали, правоъгълни цифрови сигнали за ниво или комуникационни изходни единици на шина.
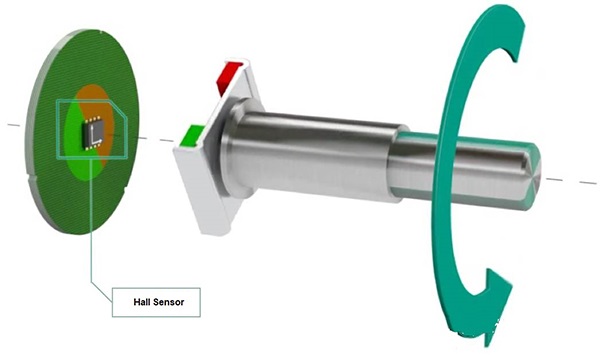
По този начин инсталирайте постоянен магнит като синтерован неодимов магнит, който генерира магнитно поле в края на въртящия се вал на енкодера, поставете чипа на датчика на Хол, споменат по-горе, върху печатна платка и се приближете до постоянния магнит в края на енкодера вал според определени изисквания (посока и разстояние).
Чрез анализиране на изходния сигнал за напрежение от сензора на Хол през печатната платка може да се идентифицира позицията на въртене на ротора на енкодера.
Структурата и принципът на работа на магнитното кодиране определят специалното изискване за този постоянен магнит, например магнитен материал, форма на магнита, посока на намагнитване и т.н. Обикновенодиаметрално магнетизиран неодимов магнитдискът е най-добрият вариант за магнит. Ningbo Horizon Magnetics имат опит в доставката на много производители на магнитни кодове с някои размери надиаметрални неодимови дискови магнити, D6x2.5mm и D10x2.5mm дискови неодимови магнити, от които са най-популярните модели.
Може да се види, че в сравнение с традиционния оптичен енкодер, магнитният енкодер не се нуждае от сложен кодов диск и източник на светлина, броят на компонентите е по-малък и структурата за откриване е по-опростена. Освен това самият елемент на Хол също има много предимства, като твърда структура, малък размер, леко тегло, дълъг експлоатационен живот, устойчивост на вибрации, не се страхува от прах, масло, водни пари и замърсяване от солена мъгла или чакане на корозия.
Когато технологията на магнитния енкодер се приложи към обратната връзка за позицията на въртене на електрическия мотор,синтерован магнитен цилиндър NdFeBна магнитния енкодер може да се монтира директно в края на вала на двигателя. По този начин той може да елиминира преходния съединителен лагер (или съединител), необходим при използване на традиционния енкодер с обратна връзка, и да постигне безконтактно измерване на позицията, което намалява риска от повреда на енкодера (или дори повреда) поради вибрациите на механичния вал по време на работата на електродвигателя. Поради това спомага за подобряване на стабилността на работата на електродвигателя.
Време на публикуване: 21 юли 2022 г